THE CHALLENGE
Natural and man-made disasters are becoming more and more commonplace. As these disasters increase in number, so does the need for, and risk to, first responders who search through rubble and rescue survivors. In response to these increased risks, legged mobile robots have emerged as a first response option as they can maneuver over uneven ground quite well using discrete ground contact points. Unfortunately, the robot’s legs' ability to stabilize and maneuver is significantly hampered when the ground is unstable. To improve robot performance, it is imperative that we improve device stability in all conditions.
OUR SOLUTION
Using biology as inspiration, Pinhas Ben-Tzvi developed the Roll-Revolute-Revolute Robotic Tail (R3-RT) as a solution to the stability problems imposed by legged robots. This mechanism is designed to be mounted on legged robots to enhance stabilization, maneuverability, dynamic self-righting, and manipulation. Furthermore, the R3-RT may enable simplification of the control algorithms for the legs of the robots by reducing the burden on those limbs. By increasing the functionality of these robots, they will be able to cover more ground in shorter amounts of time leading to faster, more efficient search and rescue operations and explorations of hostile environments. By continuing the advancements of this technology, these systems can augment and eventually exceed human capabilities.
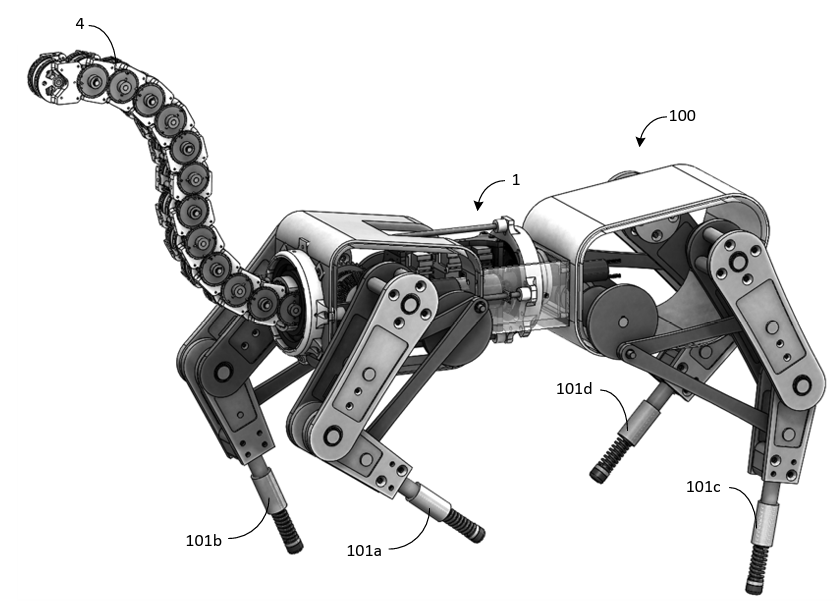
Figure: 3D model of the Roll-Revolute-Revolute Robotic Tail (R3-RT)
