THE CHALLENGE
Legged robots have demonstrated superior mobility when traversing difficult and uneven terrain compared to both wheeled and tracked vehicles. This advantage makes legged robots the preferred choice for search and rescue systems in the aftermath of disasters. Few robots have been successfully developed and used in the field due to the necessary complexity of design and control. In order for the robot to navigate uneven terrain using a symmetric or asymmetric gait, a minimum of three active degrees of freedom are needed resulting in a complex, high-priced system.
OUR SOLUTION
Pinhas Ben-Tzvi and his team at Virginia Tech have invented a sleek and robust robot leg design capable of withstanding the high ground reaction forces associated with running/trotting; they have named it the BOLT - Bio-inspired, One degree of freedom, Leg for Trotting. The proposed mechanism uses only one degree of freedom and can jump up to 50% of its body height. The integration of the BOLT into a legged platform with an external balance unit results in a significantly lower cost robot. This system can be utilized for high performance search and rescue operations as well as four-legged toys and urban robotic helpers thanks to the lightweight, cost-effective nature of the design.
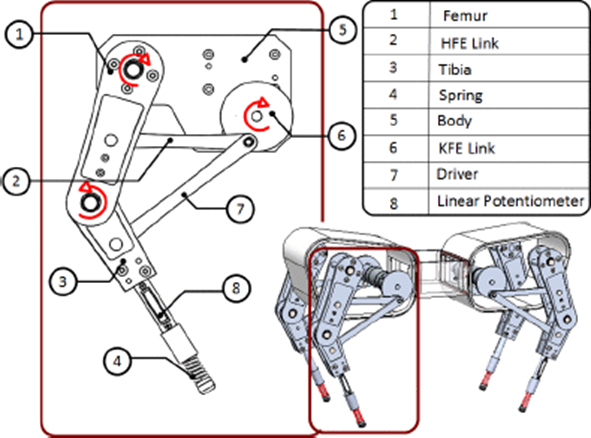
Schematic diagram of the BOLT mechanism with an inset computer rendering of BOLT integrated into a quadrupedal robot.
